Shape-shifting modular interactive device unveiled

A prototype for an interactive mobile device, called Cubimorph, which can change shape on-demand will be presented this week at one of the leading international forums for robotics researchers, ICRA 2016, in Stockholm, Sweden [16-21 May].
The research led by Dr Anne Roudaut from the Department of Computer Science at the University of Bristol, in collaboration with academics at the Universities of Purdue, Lancaster and Sussex, will be presented at the International Conference on Robotics and Automation (ICRA).
There has been a growing interest toward achieving modular interactive devices in the human computer interaction (HCI) community, but so far existing devices consist of folding displays and barely reach high shape resolution.
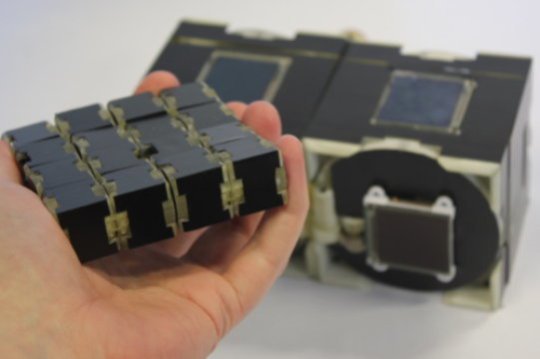
Cubimorph is a modular interactive device that holds touchscreens on each of the six module faces and that uses a hinge-mounted turntable mechanism to self-reconfigure in the user’s hand. One example is a mobile phone that can transform into a console when a user launches a game.
The modular interactive device, made out of a chain of cubes, contributes towards the vision of programmable matter, where interactive devices change its shape to fit functionalities required by end-users.
At the conference the researchers will present a design rationale that shows user requirements to consider when designing homogeneous modular interactive devices.
The research team will also show the Cubimorph mechanical design, three prototypes demonstrating key aspects — turntable hinges, embedded touchscreens and miniaturisation and an adaptation of the probabilistic roadmap algorithm for the reconfiguration.
Dr Anne Roudaut, Lecturer from the University’s Department of Computer Science and co-leader of the BIG (Bristol Interaction Group), said: “Cubimorph is the first step towards a real modular interactive device. Much work still needs to be achieved to put such devices in the end-user hands but we hope our work will create discussion between the human computer interaction and robotics communities that could be of benefit to one another other.”
About The Author